一、演示示例
正常版本
自动掉头返程循环跑(pro加强版)
二、课程讲解
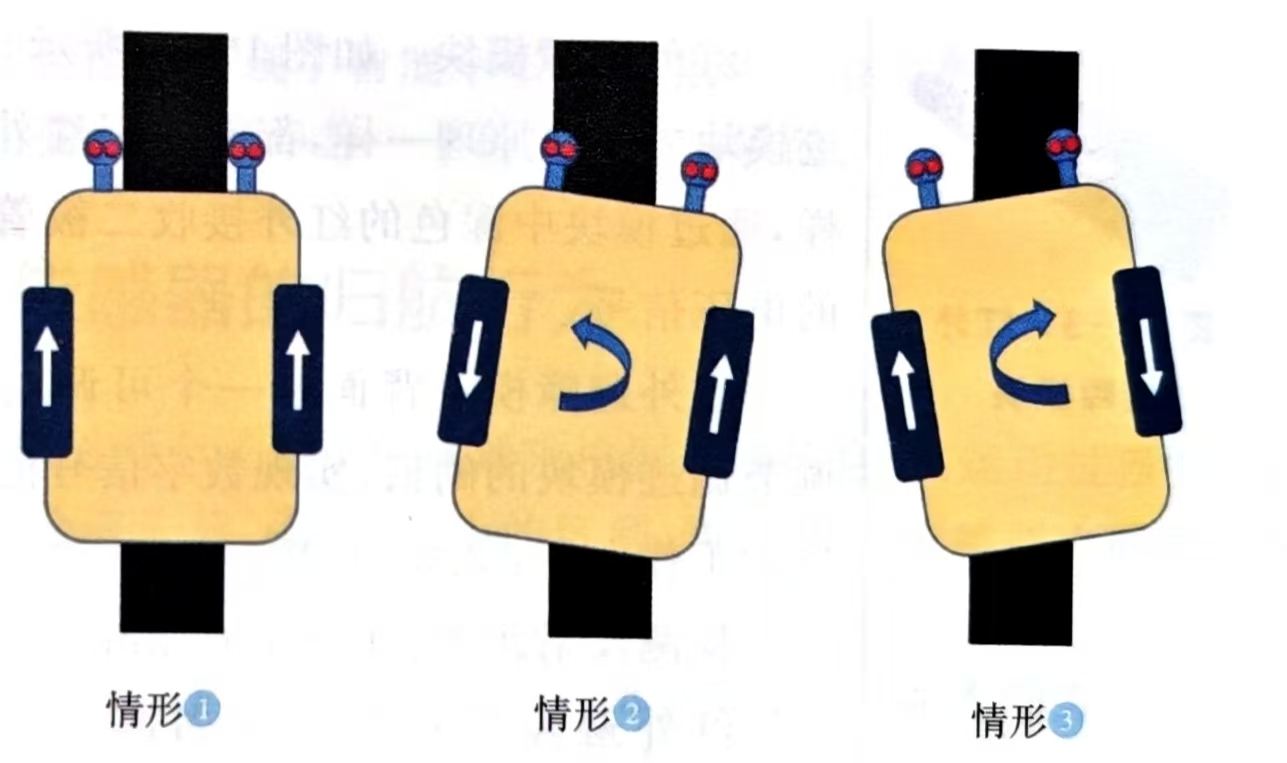
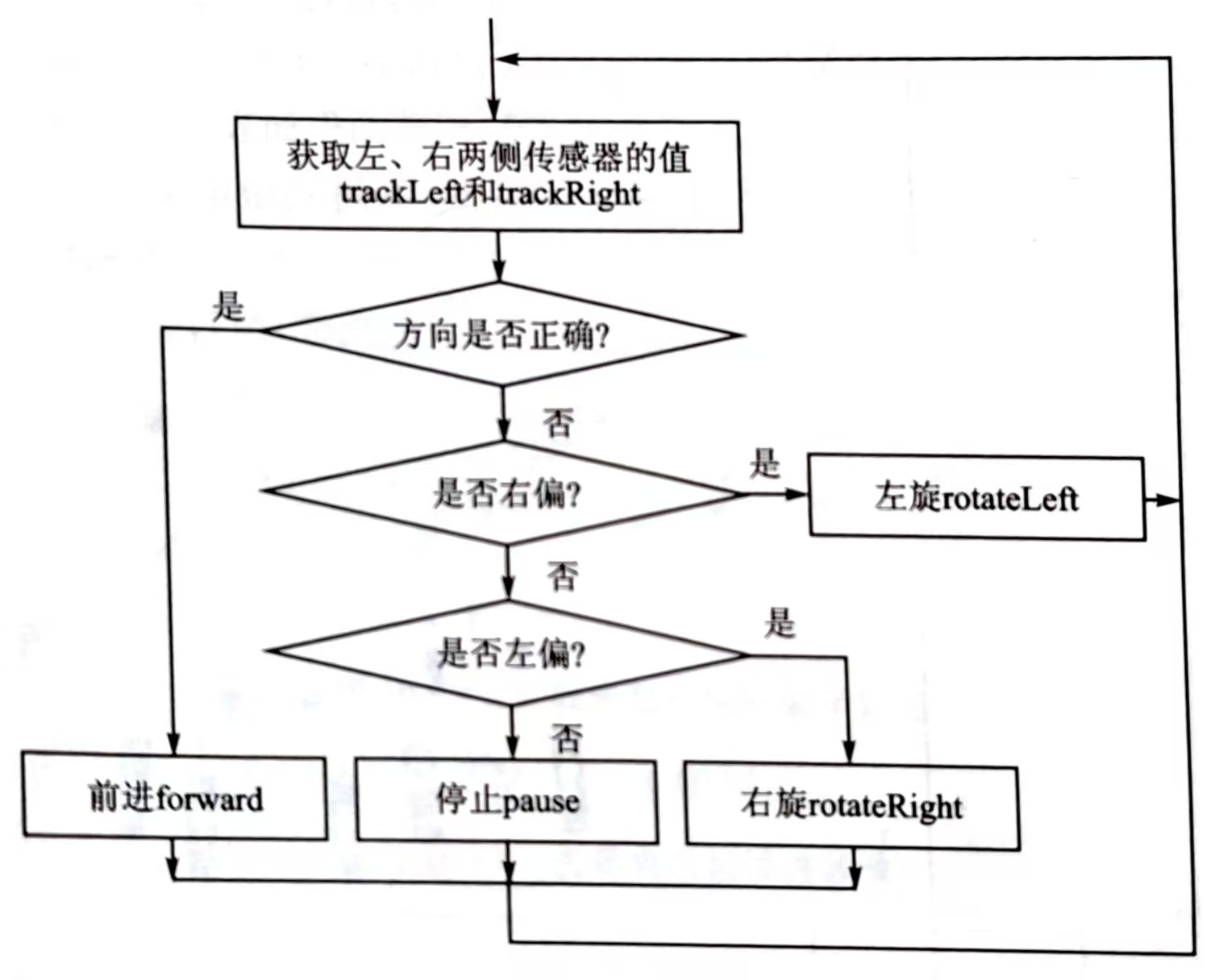
(一)、原理
循迹小车通过“循迹模块”感应黑线位置,若右侧传感器感应到驶离黑线,则往左转;若左侧传感器感应到驶离黑线,则往右转。
“循迹模块”感应到面前为黑线,则输出高电平,若不是黑线,则输出低电平。
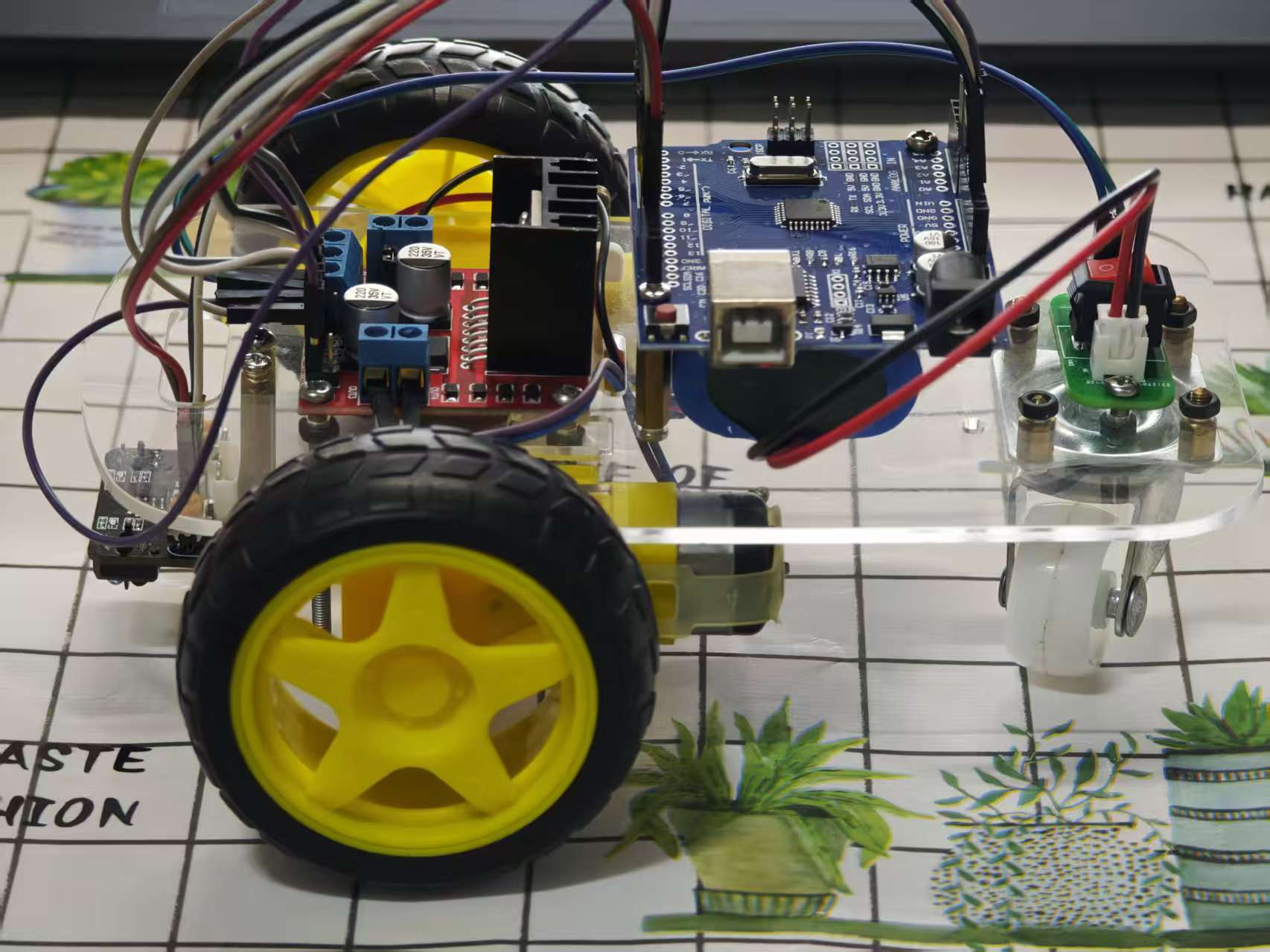
(二)、组装
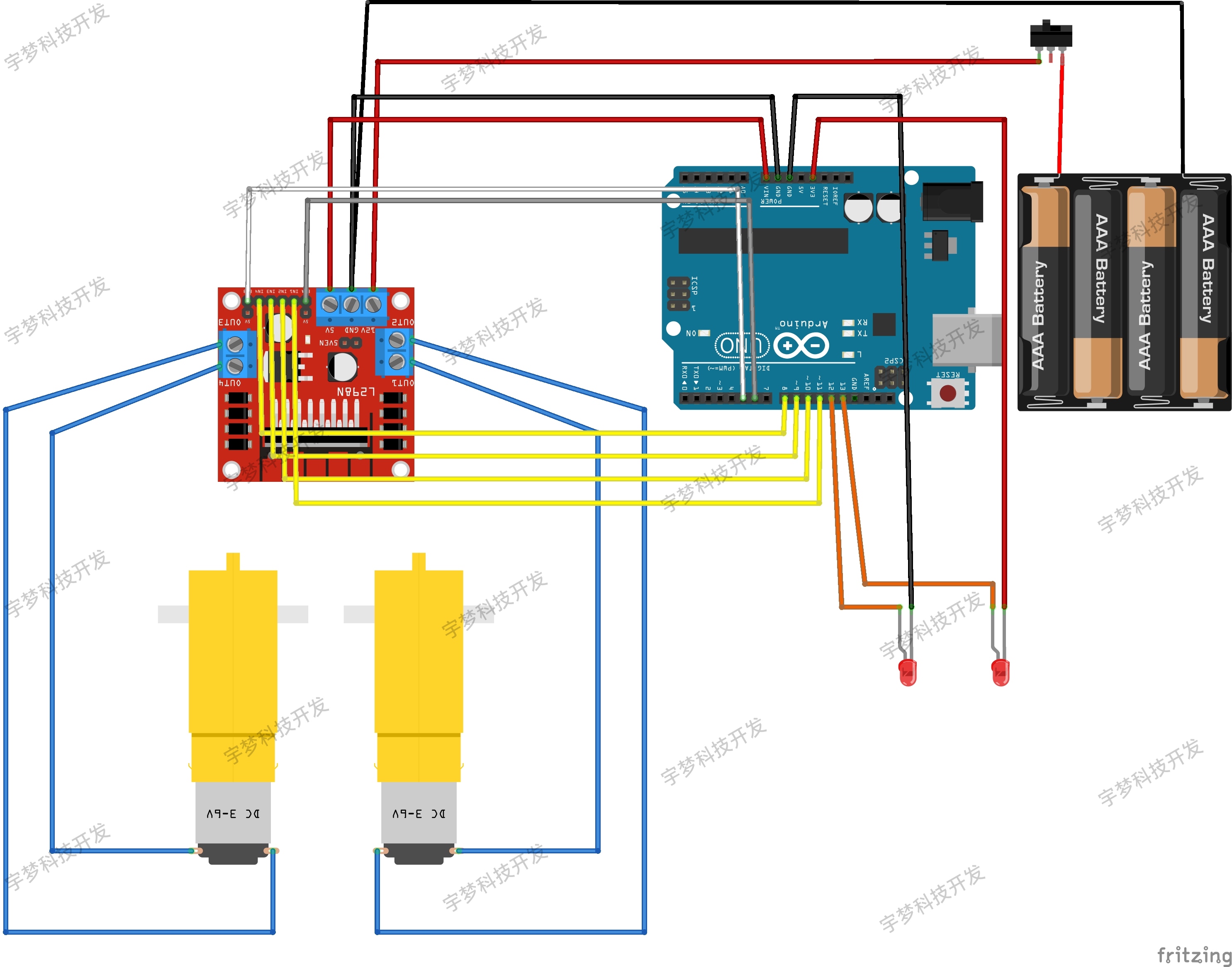
电路连接图 引用请标明出处
(三)、代码说明
const int Pin = 12; 定义常量,此常量无法后续改变其数值,一般用来定义引脚
int a = 1; 定义变量,此变量后续可以通过程序改变数值
pinMode(Pin,OUTPUT/INPUT); 设置引脚模式,是输出OUTPUT/输入INPUT
digitalRead(Read_Pin); 读取引脚高低电平值,高电平输出为“1”,低电平输出为“0”
Serial.begin(9600); 设置串口波特率,一般为9600,,可搭配Serial.print(a);使用
if(){} else if(){} else{} 判断语句
digitalWrite(Pin,HIGH/LOW); 给指定端口写入高低电平
analogWrite(Pin,0~255); 给指定端口写入模拟信号,数值0~255,可以用来控制小灯亮度
逻辑关系说明:
&&代表并列,两条件必须同时满足
||代表或,两条件满足其中一个就可以
(四)、学术交流详情
该源码暂不对外开放!!!
如有问题,可以在评论区提问题(需注册本网站账号才可评论)